World’s Smallest Autonomous Drone With AI Capabilities
Autonomous drones are making their big debut now more than ever, especially when it comes to our commercial needs, which include the drones used by Amazon to deliver packages autonomously, for example. One of the major issues that these types of drones have, however, is flying on specific routes while avoiding any obstacles that get in the way.
A new record has been set for the creation of the world’s smallest autonomous nano drone. Created by a team consisting of computer scientists from the University of Bologna in Italy and ETH Zurich, Switzerland, the Crazyflie 2.0 nano quadcopter is able to control itself completely without having to need any human intervention during the flight process whatsoever!
They presented all of their efforts and what they’ve achieved thus far in a published paper on arXiv. Their impressive creations have only just started, starting with new improvements to a number of ideas that have been put forward thus far.
Though autonomous flight is considered to be too expensive where nano drones are concerned, this new drone is only one of a line of models attempted to overcome a number of presented obstacles. For example, to overcome the issue of low-power microcontrollers, as well as cost, in general.

Interestingly enough, the new nano drone is, at this time of writing, the only nano drone in the world that is able to horizontally fly. The training process for the Crazyflie 2.0 nano quadcopter was done using images taken in the thousands from cars and bicycles that drove along a number of streets and roads.
This is also the same where power, bandwidth, and memory are concerned in regard to AI drones. This new drone, however, uses a small amount 94 milliWatts of energy and the Parallel Ultra Low Power, also known as “PULP”, platform, compared to an older model that needed to be in constant contact with a laptop that ran DroNet, the convolutional neutral platform.
Make no mistake, however, the PULP platform is specifically designed to aid in crunching numbers, while DroNet, which we’ve seen before in the Bebop 2 by Parrot, ties everything together to create the best of both worlds.
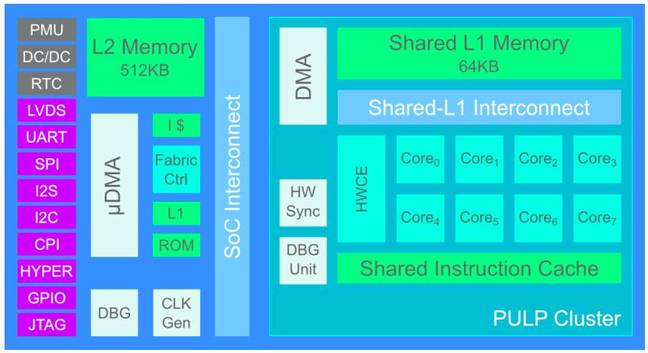
Image credit: Palossi et al.
DroNet is able to process incoming images coming from the camera at a rate of 20 frames per second, all while working out its own steering angle to fully control the direction of the nano drone. What’s more, it’s able to calculate the probability of collisions at the same time, knowing whether it should keep flying in that direction or change its course.
DroNet performs some of the most computationally intense kernels in regard to algorithms that are required to be parallel across a total of 8 of the RISC-V cores used. The newer system, thankfully, is slightly smaller in size and is able to perform fewer computations in order to reach the same performance level. The fact that it’s used with a nano drone makes it that much more impressive.
At this time of writing, however, there are a couple of kinks that need to be worked out with the newer model. A couple of the setbacks originally seen in the older model is being worked on in the new model. For example, the nano drone is currently unable to fly both up or down and is only able to move in a horizontal direction.
Though some aspects have not been as thoroughly tested in the new model as it was in the old one, the nano drone is only able to fly for between 3 to 4 minutes. This is due to the processor’s payload, which will be further tested in the future to ensure that more improvements can be made to the new model.
The Crazyflie 2.0 nano quadcopter uses the GAP8, which is a chip that is based on the architecture that went into the RISC-V open-source processors, which are basically the same size as a 50 cent coin.
Though there is still a lot of work to be done on the newer model of the Crazyflie 2.0 nano quadcopter, we hope that this will open up a new chapter for autonomous drones and their overall level of capabilities from here on out.

Kennedy Martinez
kennedy@dronethusiast.comKennedy Martinez is a resident writer who joined Dronethusiast at the beginning of 2019. She has years of experience reviewing drones and other tech products. When it comes to flying drones, Kennedy loves the ability to create artistic videos from a unique point of view. Kennedy enjoys researching new drones and other exciting products that are available to consumers which is why she is committed to creating the best buyer's guides for our readers.



Okay, to begin with it, the way i read this article, it is a man made and programmed drone, it probably receives and compares images or information that it did not assimilate itself. Kindly explain how this is autonomous.
I would really enjoy being able to do an AI drone .. You just don’t know how excited I would be to actually make one. Unfortunately I don’t have the knowledge of programming nor know what is the best product items to be added to make up a simple AI drone .. As far as skills I have a mechanical and electrical background which is something that will support my endeavor. With a little push with a coach to train me on how to program would be a blessing in disguise.